Difference between revisions of "AMSO"
m (Reverted edits by 87.160.169.77 (talk) to last revision by 24.189.13.71) |
|||
| Line 21: | Line 21: | ||
Will you be able to abort the mission in time? | Will you be able to abort the mission in time? | ||
Will you be able to use the DPS engine of the LM to get back to Earth? | Will you be able to use the DPS engine of the LM to get back to Earth? | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Revision as of 19:38, 17 February 2015
|
Project home: ACSofts AMSO homepage |

AMSO (Apollo Mission Simulator for Orbiter) is an add-on for Orbiter, created to reproduce the flights of the American Apollo Program, exploring the Moon from 1968 to 1972. The addon currently simulates missions from Apollo 8 to Apollo 17.
The main purpose of AMSO is to give users the possibility to live in first person this great challenge of our century, letting them, in the same time, choose the way they prefer to succeed. The user will be able to accomplish his mission flying the vessels completely manually (and this is a big challenge), or with the aid of some clever autopilot programs, that reproduce some features of real Apollo guidance system, created by LazyD; those will assist the Commander in some crucial phases of the flight, without depriving Orbinauts of their fun.
One of its greater qualities is the astonishing graphic made by Luis Teixeira, which allows the user to enjoy a complex meshing and texturing work without losing notably Frames Per Second; an example is the accurate Virtual Cockpit for both CSM and LM, for the moment unusable, but so accurate that gives a great immersion in phases of flight like docking and landing. For Docking manoeuvre a full-working and realistic Crewman Optical Alignment Sight (COAS) is provided on both CSM and LM.
Complex moon scenarios will allow pioneers to explore the surface of historical landing locations, with craters, mountains, rilles and particular soil characteristics; astronauts, with completely new meshes and fully movable visors, will have the possibility to plant flag, deploy SWC and ALSEP experiments, drill the soil and collect rock samples dynamically generated, and on the way back to Earth, during J-type missions, to retrieve useful materials from the fully simulated CSM Sim-bay.
And if a malfunction occurs? Crew members will have the possibility to test their nerves and skills facing a wide range of dangerous situation, from a simple autopilot malfunction to the Cryo Tank explosion aboard Apollo 13. Will you be able to abort the mission in time? Will you be able to use the DPS engine of the LM to get back to Earth?
History
Version 1.10
Structural change(s)
- Config files are now also located into private directories.
ATTENTION !!! This change invalidate scenarios of previous version. Refer to the remark of INSTALLATION" chapter, in the documentation file, to learn how to make old scenarios compatible again.
Interface change(s)
- The damage & failure probability x10 command, which was set on "End" key for both CSM and LM vessels, has been displaced on the "F12" key.
- LM:P66 manual flight mode. To avoid conflict with standard Orbiter zoom command in external view, vertical speed commands on "PageUp" and "PageDown" keys are displaced on the pair of keys "Insert" (increment) and "Delete" (decrement).
Features change(s)
- LM:P66 manual flight mode. The display line do not use anymore metric units. parameters units used are now "Knots" for the horizontal speed, "ft/s" for the lateral & vertical speeds and finally, "ft" for the altitude.
New feature(s)
- LM:P66 manual flight mode. The "End" key allow to reset the vertical speed to zero.
- Full simulation of the Astronaut recovery with helicopter, after normal splashdown.
New scenario(s)
- Apollo 11 step 31, 32 and 33, demonstrate the basic of Astronauts recovery feature, with the helicopter.
Version 1.11


This AMSO version supported the whole basic mission profile, including detailed lunar surface activities and recovery. The landing sites got propped up with dynamically created rocks in various sizes.
Corrections
- Maximum admissible dynamic pressure wasn't set properly in configurations with active abort tower. Depending on the atmospheric characteristics when aborting, this was leading to an abnormal lost of the CSM vessel (Angel sequence).
- All aborts configurations, with or without abort tower and for all direct abortS (aborts requiring direct reentry, because CSM is unable to build a safe orbit) has been deeply tested and the code was revised accordingly. This revision resulted in a slight increase to 250 kPa, of the maximum admissible dynamic pressure and a full revision of the CM attitude thrust characteristics, in order the CM can apply maximum aerodynamic lift properly, for all direct reentry mentionned before.
- Removed all the unecessary pitch trim initialisation to avoid the activation and the display of trim setting. In the case of the LM, this could have conflicted with the manual flight mode.
- With the helicopter, the point were hovering thrust turn to zero, when reducing the collective pitch with "Delete" key, will now come sooner, so you can obtain Orbiter "landed" status with much less "Delete" key strokes.
Documentations
- Added the two chapters "THE FOUR LAUNCH PHASE ABORT MODES" and "AERODYNAMIC LIFT", so the user will know all the necessary to perform successfully direct reentry aborts.
Version 1.12
This version of AMSO saw dramatic changes in its visual appearance, showing new photo-realistic meshes. The most dramatic change happened for the landing sites, now showing nearly realistic 3D terrains. Also the initially simple launch sequences saw great upgrades. Also the J-missions (Apollo 15 and following) now have a SIM bay which will can be deployed. It was released on Monday, July 16, 2007.
Improvements
- Luis Teixeira has done a marvellous tuning and texturing work on many AMSO meshes. As a result, all AMSO vessels are now looking more beautiful and real than ever. Even the command module will show burned in case of atmospheric high speed reentry or intact, in case of a premature abort sequence, before or short after the launch.
- AMSO feature now a completely new launch scenery, with new meshes made by Luis Teixeira, accurate animations of all tower mobile parts, including the "Tail service masts" on the plateform. Lateral flams exhausted from the two sides of the launch pad are also simulated. Apollo 17 night launch has an illuminated tower and projector beams enlight the Saturn V. Code use a dynamic mesh management to enlight Saturn V stack and fade out this enlightment during the launch.
- Thanks to Luis Teixeira collaboration, AMSO include now a true 3d scenery for all landing sites. These sceneries aren't conventional at all. They are dynamically generated by AMSO and don't just use the classical base config file. They have several levels of details which guarantee a nice look, from the ground, to very far over the Moon surface. All object shadows are preserved and textures do not suffer of the well know texture pixelisation problem affecting many standard Orbiter sceneries. Finally, they are designed in a way to not necessitate Meshland addon, unless you want to be able to climb on surounding relief.
- For type "J" missions (since Apollo 15) AMSO include now a true 3d SIM bay. You can jettison the SIM bay panel and see a detailled representation of all instruments. You can deploy the sub-satellite, you can deploy the magnetometers antennas or stow them.
- AMSO now support custom sound pack for any missions.
- Added space EVA with 2 film cassettes retrieval, full RCS control and custom KILL-LINEAR function.
- Added a Surveyor III static mesh for Apollo 12 mission, plus Moon EVA task to grab the camera of this probe, like it was done in the reality.
- Added drilling activity with sound, during Moon EVA. The drill can also be embarked on the Lunar Rover.
- Added a new Moon item, the umbrella antenna, which will be deployed first, since Apollo 12.
- Improved "sample rock generator". It can now generate the sample field around a given location. The Rocks dispersion radius is variable in function of the EVA and mission. Function developped for EVA scenarios.
- You have now multiple rocks collects to do, on multiple EVA locations, for multipe EVA, depending on the mission. When all rocks were collected successfully, a new set of 6 sample rocks will be generated around the next EVA location (if any).
- Lunar Rover display the heading to follow, to reach the active EVA location and the distance to it. After all 6 sample rocks are collected on last station, the Lunar Rover display the heading to follow to reach the landing location.
- EVA Tiredness model fully redone. Now based on Astronaut activities (walk, jump) and not anymore on EVA time. Now, messages "WARNING" and "DANGER" are only based on oxigen autonomy left. When astronaut is too tired to perform salto jumps, now he make a small jump on place.
- Added breath sounds for both space & Moon EVA activities.
- Added to AMSO meshes management all the big EVA meshes. As a result, operation like starting EVA, deploying LRV, climb or disembark from LRV are now instantaneous.
- New Saturn V particles generators for exhaust flams.
- Added the full support of Mission Apollo 8, 9 and 10 and compatibility for Apollo 7.
Corrections
- Moon walking function fully revised. "turning while walking" (for example pressing "8" + "9" key on numeric keypad) has now a much greater turn ratio, so you can better turn. Tried to avoid Astronaut sliding problem (better now).
- Lunar Rover motion and driving commands fully revised. Now better turn, better deceleration, backward bug corrected. Passenger disembark bug corrected.
- For CSM, LM and helicopter the following sounds: WINDAIRSPEED; CABINAIRCONDITIONING; CABINRANDOMAMBIANCE; WINDAMBIANCEWHENLANDED. are returned under user control, via OrbiterSound control panel.
- Saturn V model has now an inter-stage ring using only 4 ullage rockets instead of 8, as it was in the reality, for most of the inhabited missions.
- For Apollo type "J" mission (since Apollo 15) CSM propulsion autonomy has been revised and allow now to perform DOI with the full stack as it was in the reality.
- SIV-B perform Moon impact manoeuver only since Apollo 13 as it was for real. Early mission do a prograde thrust until all fuel is exhausted and get a solar orbit.
- Suppressed the P19 "random start" bug and optimized the program for less fuel usage.
- Max admissible off plane for PDI reduced from 44km to 22km to minimize the risk of a PDI program failure when LM yaw to face up.
- Sign bug correction in aerodynamic lift for reenty. Now negative lift is really negative.
- P65 tuning for more accurate timing and auto-cut altitude.
Documentations
- Migration to ".DOC" format of the user manual, instead of the rough ".TXT" format.
- Documentation revised to take in account the new features. Also added some trick infos and precised several unclear points.
- Addition of a new document "EVA.doc" which contain landing site EVA maps and instructions on how to complete each mission during the Moon stay.
Version 1.13
Improvements
- Pressurization vapor before liftoff and ice + condensation effects added on launch.
- LM landing probe poles added.
- SM light mast work. It erect when beacons lights are lit and glow light.
- All thrusters flames customized.
- Saturn V autopilot can now intercept LOI Moon plane, if LOI MJD is specified into launch scenario with "MJDLOI".
Corrections
- Now, space EVA for mission "J" can be performed until the jettison of Service Module.
- Space EVA film cassette #1 position corrected.
- Abnormal docking after definitive LM ascent stage separation cannot anymore be performed.
- High band umbrella antenna now available only for Apollo mission 12 to 14.
- Apollo 10 launch scenario launch time corrected.
- Azimuth correction range modified to +- 20 degrees.
- Removed the forget beacon auto-toggle.
- Tunings of LM RCS flams and correction of missing one, when Apollo vessel is in CM configuration.
Documentations
- Added description on how to do a correct launch into the "LAUNCH TOWER AND PAD-39A" in the user manual.
- Several corrections and addition to take in account the corrections and the new features.
Version 1.14
Improvements
- Improvement of the ice and condensation vapors effects for the liftoff scenery.
- Added the GET (Ground Elapsed Time) in the top-right corner of the screen.
- Added abort confirmation on all critical Apollo vessel abort situations.
- Revised all launch azimuts according to the NASA document "Apollo by numbers".
Corrections
- Mesh index "salad" bug in helicopter recovery sceen is now supressed.
- Distance to nozzle of 2nd stage flams adjusted.
Documentations
- Some corrections and updates.
Version 1.15
Improvements
- Added the online help feature (Ctrl-J) on all vessels.
- Added GET and AMSO info line display toggle with "Shift-Ctrl-I" on all controllable vessels.
- Added a lock walking/driving command(s) feature for Astronauts and the Lunar Rover vehicle.
- New scenario parameters to help refine the navigation.
- Added IPC (Inter Process Communications) to pass useful informations to external application like MFD plugin's.
- Added "Check orbit>base alignment" into CSM autopilot.
- Added new failure "SPS engine malfunction".
- Attempt to make "damage and failure" events less sensitive to time acceleration.
- Allowed countdown liftoff with "K" key, even if OrbiterSound is not installed.
- All scenarios redone to be compatible with new IMFD5.
- Now, LM can be activated/deactivated as long as docked with CSM.
- Now, in CSM, when docked with the LM, "J" will either jettison the SM, in case the LM is activated, or perform a definitive LM undocking, if the LM is deactivated.
Corrections
- Correction of GET display bug.
- Added the missing "Contact light" to touchdown ATC sound.
Documentations
- Updated for all the new features and changes.
Version 1.16
Improvements


- First version of Virtual cockpit in CM and LM. Only decorative for now. Don't ask which buttons or gauges are working. The answer is none of them! However, both cockpits have operational COAS (optical alignment) for docking, including the CSM docking target behind the right CM docking window, installed automatically when beacons lights are activated and the LM is in ascent stage configuration. LM designation of landing target feature has been also adapted to the virtual cockpit.
- VC Crew presence, managed dynamically, dressed with or without space suits, according to situation, with beautiful completely new astronauts meshes.
- Full rework of the LM mesh, in particular the shape of the ascent stage and the addition of many new details.
- New dust effect feature on Lunar landing. This graphic feature cost graphic power (frame rate), so it can be disabled with "NODUST 1" in LM scenario parameters.
- Improved SaturnV pressurization condensation vapors effect.
- New set of LEVA Astronauts meshes with all visors animated.
- New set of space EVA astronauts meshes (Apollo 9 and an other one for missions with SIM bay), with all visors animated.
- New mission "Tribute to LazyD", with fully animated scenery. Something YOU MUST NO MISS AT ALL (the start scenario is in the directory "AMSO\Miscellanenous").
- New vessels relative (LM & CSM) KILL-LIN function for docking implemented, with 2 modes: KILL-LIN-ALL and KILL-LIN-LATERAL which do not modify the closing speed.
- Improved astronaut walk. Reworked the "turn on himself".
- Improved Lunar Rover turning capacity. Now, the Rover use a totally different method to turn and finally turn very well.
- Now the commander is the exclusive driver of the Lunar Rover. He use therefore the left (port) driver seat. Unless he die, his colleague is not allowed to drive.
- Now, after docking back to the CSM with the ascent module, it is possible to definitively quit the LM with "J" action key, before to definitively undock. This step is not mandatory.
- "INVULNERABLE 1" user parameter is now automatically transmitted to LM vessel on creation. No more need to modify the LM scenario while flying a mission.
- The new "NODUST 1" user parameter can be also mentioned in the parameters of Apollo vessel, in the initial launch scenario. It will be transmitted to the LM vessel on creation.
- New "Mini-panel" feature for CSM and LM vessels virtual cockpits.
- Added automatic KILLROT control on Apollo vessel when it reach the CM only configuration.
- Improved P66 automatic KILLROT for the LM: Added missing Yaw axis and interlock avoidance.
Modifications
- The AMSO IPC server has being removed and is now implemented into IMFD 5.1. This way of doing is more efficient, because it will allow IMFD to get data's from any vessels which connect to this IPC and even multiple vessels in a same scenario.
ATTENTION !!! This new AMSO version require IMFD 5.1 or over to benefit of the data's exchanges feature.
WARNING !!! New version of IMFD has improved trajectories computation. As a result, all AMSO scenarios with IMFD presets ARE NOT ANYMORE OPTIMUM.
- The special feature to allow the CSM to be usable from an external addon like "NASA VSE SC" by António Maia is abandoned for technical reasons.
Corrections
- Graphic bug of the double hatch removed (patched in 1.15).
- Crash To Desktop bug when ascent stage is destroyed on the Moon surface is removed (patched in 1.15).
- CSM magnetometers antennas can now be deployed/stowed before to deploy the sub-satellite (patched in 1.15).
- No more docking system for Apollo 8 mission (patched in 1.15).
- Random Failures corrections to avoid some too much frequent events. For example in the LM, the "CARBURANT LEAK" when the LM was even not in the liftoff preparation will not anymore occur and before liftoff, with a much lower probability.
- If both astronauts die on the Moon surface, it is not anymore possible to lift off with the LM.
- Moved down the "GET" display, so that the frame rate display is not cut, depending of the used fonts.
- Added to LM the missing beacons on the front and the back.
- Propagation of "INVULNERABLE 1" user parameter through subsequent scenarios saving is now working properly.
- Now, atmospheric Dynamic pressure vulnerability check work as expected. Before, only the 250 kPa limit was working. Now, inapropriate vessel config (CSM for example) or vessel attitude, will lead to destruction.
Documentations
- Several corrections of forgiven obsolete descriptions.
- Some addition for the new features.
- Addition of a tutorial for the "Tribute to LazyD".
Version 1.17
Improvements
- New ATC sounds customization model. Now any number of ATC can be played at any times (also at any altitude for LM landing), determined by ATC file names themselves. There is ATC synchronized on specific events like for example, LM PDI and landing and ATC synchronized on the GET. ATC synchronized on GET can be disabled with "Ctrl-K".
- New pre-launch sound capability: now it is possible to play a pre-countdown sound, starting exactly at minus 5 minutes and in this case, the last 10 seconds countdown and liftoff will be automatically triggered.
- First sample soundpack extension for Apollo 11, featuring the new pre-launch sound capability, complete ATC for LM PDI and LM ascent Moon orbit insertion and many other new ATC.
- Added a camera shaker on Apollo and LM vessels. Different vibration ratios in function of the configuration. Staging simulation, active during all main engine thrust and during atmospheric entry.
- Added metallic particles ejection effect during all staging, including a special one during the LM ascent liftoff.
- Revised Lunar Rover, with fully animated wheels (rotation & direction), leaving dust trail when rolling, with camera shaker function in virtual view.
Corrections
- Removed the bug of the space EVA astronaut giving back helmet instead of the film cassette.
- Removed the bug of the space EVA astronaut without helmet aboard the Lunar Rover.
- Now the Master Alarm siren in LM is stopped when the malfunction is acknowledged.
- Now CM capsule is empty when astronauts are inside the pneumatic boat.
- CM will now survive to most critical LOS abort at about GET 000:01:12.
- Escape tower has now all exhausts with the custom texture.
- Launch scenarios start now 5 minutes 30 seconds before the liftoff time.
- Correction of LM RCS ROT "pitch down" flames direction.
- Correction of LM ascent stage RCS flames positions.
- Removal of several other bugs not signaled by user's but detected during the intensive test sessions made with Matteo, alias the "Bloodhound".
Documentation
- New user manual including picture illustrations and a table of content. All textes revised by a native English speaking person.
- Some addition for the new features.
Version 1.18
Improvements
- This version introduces the new Lunar Rover Vehicle (LRV), with full realistic deployment from the LM compartment.
This deployment include the unfolding sequence to the Moon ground and then, a sequencial animation which mount all further equipments, onto it. This new LRV simulate thermal variations of the forward batteries pack and therefore, you will need to manage the dust protection covers of the batteries radiators mirrors.
- Giroscopic sub-satellite stabilization, with a rotation around longitudinal axis, is now simulated when the satellite is deployed.
Corrections
- All exhaust flames textures are corrected to suppress the rectangular artefact which was sometimes visible around the flames.
Version 1.20
Improvements
Version 1.21 (Current)
Improvements
Available Vessels
Saturn V

The “little child” of Werner von Brown, a three-staged, liquid propelled, 111 meters tall rocket will send you in parking orbit around Earth at first, expending the first two stages, and will then use the remaining fuel of the third stage to shoot you toward the Moon. Lots of small and big details make this rocket a real piece of art, starting from explosive devices to interstage rotation when hit by flames.
The stages of the Saturn V from bottom to top are the massive S-IC stage with its five F-1 rocket engines, the S-II stage with five J-2 engines and the restartable S-IVB stage with its single J-2 engine.
Command and Service Module (CSM)

It is the heart of the whole travelling complex:
- SM contains life support systems, environmental control, main engine for correction and orbit insertion, RCS, docking mechanism, communication systems, experiment-bay in J-type missions (and mass dummies for normal missions);
- CM is the conic-shaped capsule atop of it; it contains the crew and the control panel, food, suits, and the heat-shield that protect the capsule from heating: it is separated from SM 15 minutes prior to entry interface (120km) and uses an autonomous RCS system for attitude control during re-entry.
Lunar Module

The LEM (or LM), spider-shaped vessel used for lunar landing and stay. Consists of several parts:
- Descent Stage provided of legs and descent engine for landing, plus experiments, tools and rover in J-type missions;
- Ascent Stage, the gibbous module linked to it, contains the crew and control panels, RCS system, plus an engine for the ascent and rendezvous with CSM in lunar orbit.
Lunar Rover

Folded into a side of the LEM, is carried on the Moon by Apollo 15, 16 and 17, and allows astronauts to travel further and carry a major load of tools and samples. It is powered by batteries, and has four steerable wheels
Available Missions
Apollo 8
Lovell, Borman and Anders spent 20 hours orbiting around the Moon on the Christmas Eve of 1968, taking pictures of Mare Tranquillitatis, and reading to the world lines of the Book of Genesis from inside the CSM.
Apollo 9
McDivitt, Scott and Schweickart orbited 10 days around the Earth testing the new Lunar Module, named Spider; an EVA was also performed by Schweickart, with the characteristic “red-helmet” space-suit.
Apollo 10
Cernan, Stafford and Young brought the LM Snoopy in orbit around the Moon, with the same flight profile of the future Apollo 11 mission. DOI was performed, but obviously not PDI.
Apollo 11
Armstrong and Aldrin landed with Eagle in Mare Tranquillitatis, while Mike Collins was orbiting above them in CSM Columbia. The first foot was set on lunar surface by Neil Armstrong, pronouncing in the mean time the words:<<That's one small step for (a) man, one giant leap for mankind.>>
Apollo 12
Conrad and Bean landed in Oceanus Procellarum, at 180 mt. from Surveyor III, waiting there since 1967. Gordon remained in CSM. Astronauts performed 2 LEVAs, and retrieved a part of the unmanned probe.
Apollo 13
“The successful failure”; Lovell, Haise and Swigert used the LM Aquarius as a life-boat , when CSM Odyssey was shut down to prevent total loss of oxygen and electricity, on the way to the moon, due to an explosion in the SM. LM’s DPS engine was used to achieved a satisfactory free-return trajectory.
Apollo 14
Shepard and Mitchell explored the Fra Mauro Highlands, while Stu Roosa conducted experiments in lunar orbit. Two LEVA were performed, and astronauts went near the Cone crater.
Apollo 15
With Worden orbiting over them, Scott and Irwin landed in the zone of the Hadley Appennine, a mountainous region near the Hadley Rille. During 3 LEVA they travelled from one side to the other of the valley using the first Lunar Rover (LRV), an electric car stowed into LM during flight. It was the first of J-Type mission, long duration moon exploration, with extensive experiments in both LM and CSM, with a deployable sub-satellite and a Space-Walk scheduled during return coast.
Apollo 16
The crew (Young & Duke on Moon and Mattingly on CSM) explored the Descartes region using the LRV, and stayed on the surface of the Moon for more than 70 hours, conducting lots of experiments during 3 LEVA.
Apollo 17
This 3rd J-type mission concluded the manned exploration of the Moon; after a night launch, Eugene Cernan and the geologist Harrison Schmitt (the first scientist to go to the Moon) explored the valley of Taurus-Littrow, remaining on the surface for 75 hours; using the last LRV, they conducted deep geological studies, discovering a particular orange soil made of melted silicates. It was December 1972.
Gallery
Separation of SI-C
Escape Tower Jettison

S-IVB stage of Apollo 8, showing the mass dummy for the LM

Rendezvous in lunar orbit

The new SIM bay

Sub-satellite being deployed from the SIM bay

Schweickart performs EVA

Al Bean and Surveyor III at Procellarum
Cernan and Orange Soil
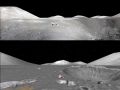
Comparison shot of the real terrain around "Shorty" crater and how it looks in AMSO 1.12

Map of the Apollo 11 landing site
View of the Apollo 11 landing site

Separation of the Command Module prior reentry

Recovery of the crew after splash-down














Videos (v 1.12)
- Video of the new launch sequence, with focus on the LUT arms
- Video of the new launch sequence during night
- Video of a day launch in the new version
- Video of the Apollo 11 landing