Difference between revisions of "AMSO"
| Line 162: | Line 162: | ||
Image:AMSO112-22.jpg|Sub-satellite being deployed from the SIM bay | Image:AMSO112-22.jpg|Sub-satellite being deployed from the SIM bay | ||
Image:apo9.jpg|Schweickart performs EVA | Image:apo9.jpg|Schweickart performs EVA | ||
| + | Image:survy.jpg|Al Bean and Surveyor III | ||
Image:orange.jpg|Cernan and Orange Soil | Image:orange.jpg|Cernan and Orange Soil | ||
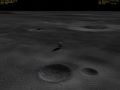
Image:AMSO112-27.jpg|Comparison shot of the real terrain around "Shorty" crater and how it looks in AMSO 1.12 | Image:AMSO112-27.jpg|Comparison shot of the real terrain around "Shorty" crater and how it looks in AMSO 1.12 | ||
Revision as of 08:55, 1 April 2008
|
Project home: ACSofts AMSO homepage |

AMSO (Apollo Mission Simulator for Orbiter) is an add-on for Orbiter Space Flight Simulator by Martin Schweiger.
It reproduces the historical flights of the American Apollo Project for the exploration of the Moon from 1968 to 1972, from Apollo 8 to Apollo 17.
The main purpose of AMSO is to give users the possibility to live in first person this great challenge of our century, letting them, in the same time, choose the way they prefer to succeed. The user will be able to accomplish his mission flying the vessels completely manually (and this is a big challenge), or with the aid of some clever autopilot programs, that reproduce some features of real Apollo guidance system, created by LazyD; those will assist the Commander in some crucial phases of the flight, without depriving Orbinauts of their fun.
One of it’s greater quality is the astonishing graphic made by Luis Teixeira, which allows the user to enjoy a complex meshing and texturing work without loosing notably Frames Per Second; an example is the accurate Virtual Cockpit for both CSM and LM, for the moment unusable, but so accurate that gives a great immersion in phases of flight like docking and landing. For Docking manoeuvre a full-working and realistic Crewman Optical Alignment Sight (COAS) is provided on both CSM and LM.
Complex moon scenarios will allow pioneers to explore the surface of historical landing locations, with craters, mountains, rilles and particular soil characteristics; astronauts, with completely new meshes and fully movable visors, will have the possibility to plant flag, deploy SWC and ALSEP experiments, drill the soil and collect rock samples dynamically generated, and on the way back to Earth, during J-type missions, to retrieve useful materials from the fully simulated CSM Sim-bay.
And if a malfunction occurs? Crew members will have the possibility to test their nerves and skills facing a wide range of dangerous situation, from a simple autopilot malfunction to the Cryo Tank explosion aboard Apollo 13. Will you be able to abort the mission in time? Or to use the DPS engine of LM to get back to Earth?
History
Version 1.10
New feature(s)
- LM:P66 manual flight mode. The "End" key allow to reset the vertical speed to zero.
- Full simulation of the Astronaut recovery with helicopter, after normal splashdown.
Version 1.11


This AMSO version supported the whole basic mission profile, including detailed lunar surface activities and recovery. The landing sites got propped up with dynamically created rocks in various sizes.
Corrections:
- All aborts configurations, with or without abort tower and for all direct abortS has been deeply tested and the code was revised accordingly. This revision resulted in a slight increase to 250 kPa, of the maximum admissible dynamic pressure and a full revision of the CM attitude thrust characteristics.
Version 1.12
This version of AMSO saw dramatic changes in its visual appearance, showing new photo-realistic meshes. The most dramatic change happened for the landing sites, now showing nearly realistic 3D terrains. Also the initially simple launch sequences saw great upgrades. Also the J-missions (Apollo 15 and following) now have a SIM bay which will can be deployed. It was released on Monday, July 16, 2007. Improvements:
- AMSO feature now a completely new launch scenery, accurate animations of all tower mobile parts, including the "Tail service masts" on the plateform.
- AMSO includes now a true 3d scenery for all landing sites.
- For type "J" missions AMSO include now a true 3d SIM bay.
- AMSO now support custom sound pack for any missions.
- Added a Surveyor III static mesh for Apollo 12 mission.
Version 1.13
Improvements:
- Pressurisation vapor before liftoff and ice + condensation effects.
- SM light mast work.
- Saturn V autopilot can now intercept LOI Moon plane
Version 1.14
Improvements:
- Added the GET.
Version 1.15
Improvements:
- Added the online help feature (Ctrl-J) on all vessels.
- All scenarios redone to be compatible with new IMFD5
Version 1.16
Improvements:


- First version of Virtual cockpit in CM and LM. Only decorative for now. Both cockpits have operational COAS (optical alignment).
- VC Crew presence, managed dynamically.
- Full rework of the LM mesh.
- New dust effect feature on Lunar landing.
- New set of LEVA Astronauts meshes with all visors animated.
- New set of space EVA astronauts.
- New mission "Tribute to LazyD".
Version 1.17
- New ATC sounds customization model. Now any number of ATC can be played at any times (also at any altitude for LM landing), determined by ATC file names themselve. There is ATC synchronized on specific events like for example, LM PDI and landing and ATC synchronized on the GET. ATC synchronized on GET can be disabled with "Ctrl-K".
- New pre-launch sound capability: now it is possible to play a pre-countdown sound, starting exactly at minus 5mn and in this case, the last 10 seconds countdown and liftoff will be automatically triggered.
- First sample soundpack extension for Apollo 11, featuring the new pre-launch sound capability, complete ATC for LM PDI and LM ascent Moon orbit insertion and many other new ATC.
- Added a camera shaker on Apollo and LM vessels. Different vibration ratios in function of the configuration. Staging simulation, active during all main engine thrust and during atmospheric entry.
- Added metallic particles ejection effect during all staging, including a special one during the LM ascent liftoff.
- Revised Lunar Rover, with fully animated wheels (rotation & direction), leaving dust trail when rolling, with camera shaker function in virtual view.
Available Vessels
Saturn V

The “little child” of Werner von Brown, a three-staged, liquid propelled, 111 meters tall rocket will send you in parking orbit around Earth at first, expending the first two stages, and will then use the remaining fuel of the third stage to shoot you toward the Moon. Lots of small and big details make this rocket a real piece of art, starting from explosive devices to interstage rotation when hit by flames.
The stages of the Saturn V from bottom to top are the massive S-IC stage with its five F-1 rocket engines, the S-II stage with five J-2 engines and the restartable S-IVB stage with its single J-2 engine.
Command and Service Module (CSM)

It is the heart of the whole travelling complex:
- SM contains life support systems, environmental control, main engine for correction and orbit insertion, RCS, docking mechanism, communication systems, experiment-bay in J-type missions;
- CM is the conic-shaped capsule atop of it; it contains the crew and the control panel, food, suits, and the heat-shield that protect the capsule from heating: it is separated from SM 15 minutes prior to entry interface (120km) and uses an autonomous RCS system for attitude control during re-entry.
Lunar Module

The LEM (or LM), spider-shaped vessel used for lunar landing and stay. Consists of several parts:
- Descent Stage provided of legs and descent engine for landing, plus experiments, tools and rover in J-type missions;
- Ascent Stage, the gibbous module linked to it, contains the crew and control panels, RCS system, plus an engine for the ascent and rendezvous with CSM in lunar orbit.
Lunar Rover

Folded into a side of the LEM, is carried on the Moon by Apollo 15, 16 and 17, and allows astronauts to travel further and carry a major load of tools and samples. It is powered by batteries, and has four steerable wheels
Available Missions
Apollo 8
Lovell, Borman and Anders spent 20 hours orbiting around the Moon on the Christmas Eve of 1968, taking pictures of Mare Tranquillitatis, and reading to the world lines of the Book of Genesis from inside the CSM.
Apollo 9
McDivitt, Scott and Schweickart orbited 10 days around the Earth testing the new Lunar Module, named Spider; an EVA was also performed by Schweickart, with the characteristic “red-helmet” space-suit.
Apollo 10
Cernan, Stafford and Young brought the LM Snoopy in orbit around the Moon, with the same flight profile of the future Apollo 11 mission. DOI was performed, but obviously not PDI.
Apollo 11
Armstrong and Aldrin landed with Eagle in Mare Tranquillitatis, while Mike Collins was orbiting above them in CSM Columbia. The first foot was set on lunar surface by Neil Armstrong, pronouncing in the mean time the words:<<It’s one small step for man, one giant leap for mankind.>>
Apollo 12
Conrad and Bean landed in Oceanus Procellarum, at 180 mt. from Surveyor III, waiting there since 1967. Gordon remained in CSM. Astronauts performed 2 LEVAs, and retrieved a part of the unmanned probe.
Apollo 13
“The successful failure”; Lovell, Haise and Swigert used the LM Aquarius as a life-boat , when CSM Odissey was shut down to prevent total loss of oxygen and electricity, on the way to the moon, due to an explosion in the SM. LM’s DPS engine was used to achieved a satisfactory free-return trajectory.
Apollo 14
Shepard and Mitchell explored the Fra Mauro Highlands, while Stu Roosa conducted experiments in lunar orbit. Two LEVA were performed, and astronauts went near the Cone crater.
Apollo 15
With Worden orbiting over them, Scott and Irwin landed in the zone of the Hadley Appennine, a mountainous region near the Hadley Rille. During 3 LEVA they travelled from one side to the other of the valley using the first Lunar Rover (LRV), an electric car stowed into LM during flight. It was the first of J-Type mission, long duration moon exploration, with extensive experiments in both LM and CSM, with a deployable sub-satellite and a Space-Walk scheduled during return coast.
Apollo 16
The crew (Young & Duke on Moon and Mattingly on CSM) explored the Descartes region using the LRV, and stayed on the surface of the Moon for more than 70 hours, conducting lots of experiments during 3 LEVA.
Apollo 17
This 3rd J-type mission concluded the manned exploration of the Moon; after a night launch, Gene Cernan and the geologist Schmitt (the first scientist to go to the Moon) explored the valley of Taurus-Littrow, remaining on the surface for 75 hours; using the last LRV, they conducted deep geological studies, discovering a particular orange soil made of melted silicates. It was December 1972.
Gallery
Separation of SI-C
Escape Tower Jettison

S-IVB stage of Apollo 8, showing the mass dummy for the LM

Rendezvous in lunar orbit

The new SIM bay

Sub-satellite being deployed from the SIM bay

Schweickart performs EVA

Al Bean and Surveyor III
Cernan and Orange Soil
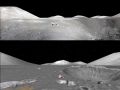
Comparison shot of the real terrain around "Shorty" crater and how it looks in AMSO 1.12

Map of the Apollo 11 landing site
View of the Apollo 11 landing site

Separation of the Command Module prior reentry

Recovery of the crew after splash-down














Videos (v 1.12)
- Video of the new launch sequence, with focus on the LUT arms
- Video of the new launch sequence during night
- Video of a day launch in the new version
- Video of the Apollo 11 landing